Home | Installation | Teleop Package | Mocap Setup | Crazyflie Control Modification | Useful BASH
DRL, CSAIL
Summer 2016
Faculty Supervisor: Daniela Rus
Supervisor: Brandon Araki
UROPs:
- Sarah Pohorecky
- Celine Qiu
- Jack Strang
Contact: flyingcar@mit.edu
Flying Car Ros Package
Repository for ROS package: Flyingcar_Ros
Description of Package:
- crazyflie_controller-A PID Controller for autonomous flight.
- crazyflie_cpp-Communication/Direct Interface with the Crazyflie. Processes for getting/sending info.
- crazyflie_description-Visualization/RVIZ stuff; URDF models.
- crazyflie_driver-High-level interface with Crazyflies. Connects to flies, publishes topics, gets/sends parameters.
- crazyflie_teleop-Control interfaces for the Crazyflie (PS3 Controller, motion capture).
- crazyflie_tools-Helper scripts.
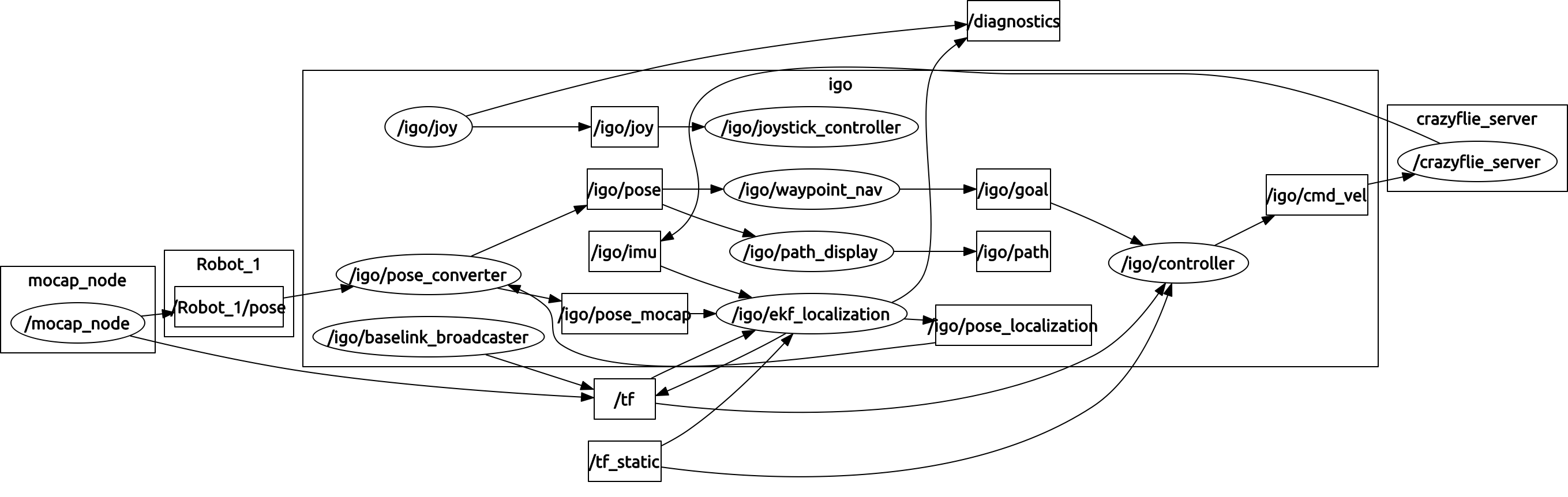
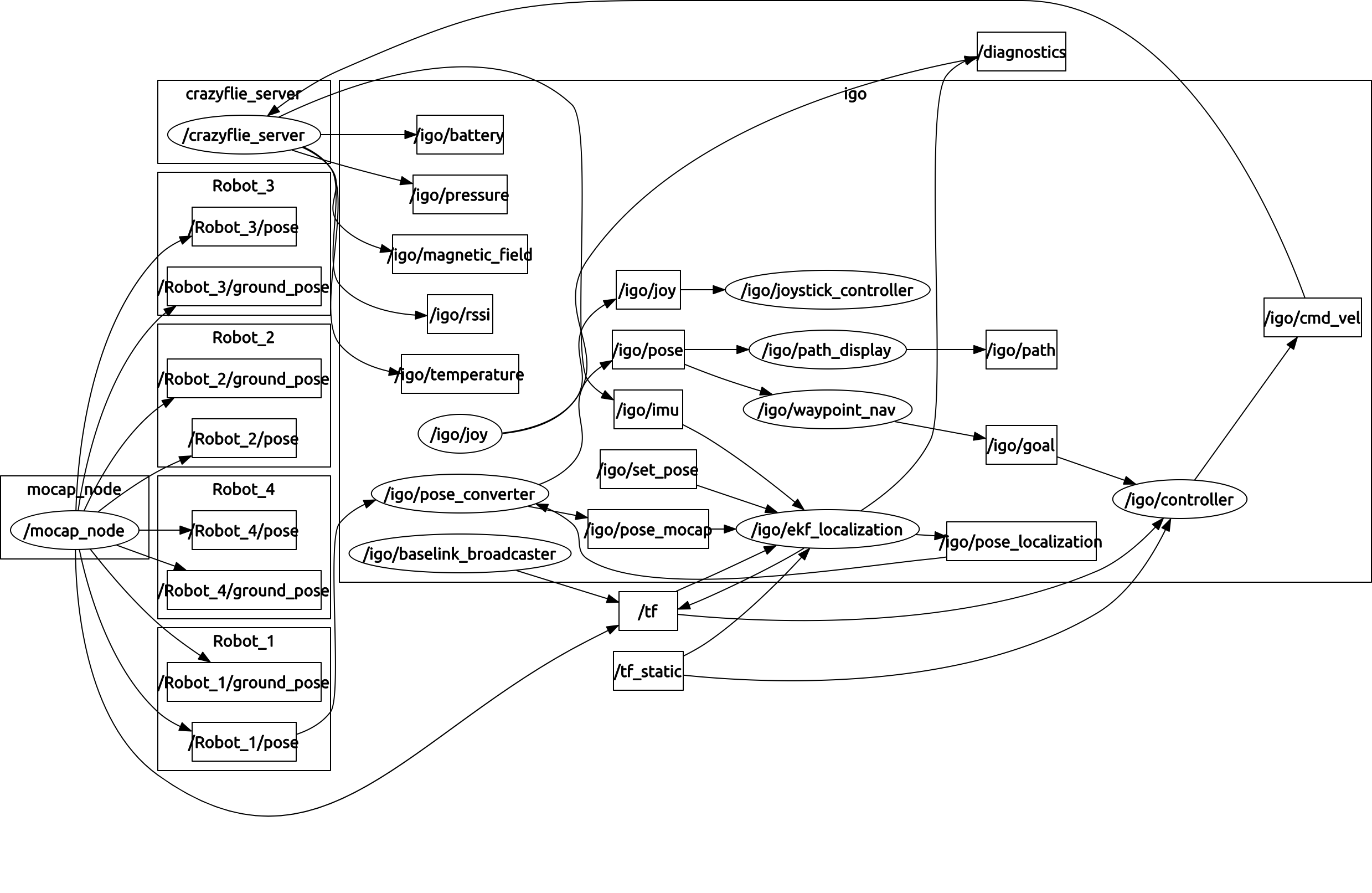
RQT GRAPH
See the compact and full node graphs.
Dependencies
- robot_localization
- hector_quadroter
- mocap_optitrack
The package was based on crazyflie_ros by ACTLab at USC. Few modifications were made to the controller, driver, or cpp packages. The teleop package contains the most original code.
TODO
- Update start_mocap arguments to include flight mode and repeatability
- Write scripts for easier multiple launching
- Finish documentation
- retest 2 Crazyflies flying with waypoint.py (not sure if it works...)
- Find a method for absolute heading for the Flies->This might require converting mocap orientation--->That WILL require learning quaternion math
- Fix Cf_selector so that unconnected crazyflies don't stay listed
- Get battery data for wheeled flie.
- figure out way to switch between mocap and joystick control?
- Update waypoint.py to stop having the flies go to 0,0,0 when they start up.
Previous Week Breakdown
- Set up ROS, start learning basics. Set up Github, Slack, etc. Build Crazyflies
- Started learning Crazyflie control. Modified Crazyflie client and ROS package to allow wheel control. Looked at mocap systems.
- Wrote CF Selector. Made PS3 launch files. Started setting up mocap.
- Tried modifying Beniot Landry's crazyflie tools. Worked poorly. Tried and failed at converting quaternion orienation from mocap data. Found robot_localization.
- Repackaged into flyingcar_ros. Got mocap teleop working. Fixed batter, etc. logging problem (baro parameters changed name). Started writing waypoint.py
- Finished waypoint. Took battery data.
{kind=link}
{kind=link}